Entièrement mous, ces robots sont moins connus que les classiques, mais ils sont utiles dans plusieurs domaines.
Quand on parle de robots, on pense souvent à des machines solides, construites en métal. Pourtant, d’autres types de robots existent. Ils font partie de ce que l’on appelle la robotique molle (« soft robotics »). Comme son nom l’indique, il s’agit de concevoir des machines composées de matériaux souples ou déformables, comme le silicone, le plastique ou encore d’autres polymères avec l’impression 3D. Ils présentent de nombreux avantages que n’ont pas les robots classiques. Explications.
De l’extérieur…
La robotique molle permet d’imiter le mouvement des organismes vivants. Par les matériaux avec lesquels ils sont fabriqués, ces robots peuvent par exemple se rapprocher des muscles humains. Ils sont ainsi plus réalistes, pouvant être créés avec des mouvements et des corps plus réels que les machines en métal. Récemment, des chercheurs de l’ETH Zurich ont par exemple réussi à imprimer une main robotique avec des os, des ligaments et des tendons en utilisant des polymères de thiolène à durcissement lent. Mieux adaptés à la manipulation d’objets fragiles, ces types de robots réduisent aussi le risque de blessures lorsqu’ils travaillent avec des humains, a assuré Robert Katzchmann, professeur de robotique de l’ETH Zurich.
La santé est un domaine où l’utilisation des robots souples est particulièrement prometteuse. Ils peuvent par exemple être conçus pour servir de prothèses. Un laboratoire de l’université Harvard a travaillé sur une prothèse destinée aux malades souffrant d’un déficit moteur, comme la sclérose latérale amyotrophique ou un accident vasculaire cérébral, pour les aider à réaliser des activités de la vie quotidienne. Elle se présente sous la forme d’un gant robotisé permettant, entre autres, à une personne ne pouvant pas bouger les doigts d’attraper un objet.
Ce laboratoire a également développé des robots portables souples, notamment pour aider les personnes souffrant de faiblesse musculaire ou les patients atteints de troubles physiques ou neurologiques. « Par rapport à un exosquelette traditionnel, ces systèmes présentent plusieurs avantages : les articulations du porteur ne sont pas contraintes par des structures rigides externes et la partie portée de la combinaison est extrêmement légère », a expliqué le laboratoire.
… à l’intérieur du corps
Toujours dans le domaine de la santé, les robots souples peuvent aussi être conçus pour une utilisation à l’intérieur du corps humain. Un dispositif destiné aux personnes souffrant de pathologies cardiaques a ainsi été développé par le laboratoire de l’université Harvard. Capable de s’enrouler autour d’un cœur défaillant, il aide l’organe à fonctionner en battant à la même cadence. Testé sur des animaux, il « imite non seulement le comportement contractile des ventricules cardiaques, mais peut également effectuer des mouvements de torsion qui peuvent restaurer le flux sanguin en cas d’insuffisance cardiaque grave », a affirmé le laboratoire.
Dans le domaine spécifique de la chirurgie, le King’s College au Royaume-Uni a mené le projet STIFF-FLOP il y a quelques années. Financé par l’Union européenne (UE), son but était de construire « un bras robotique souple capable de se glisser dans le corps, de manœuvrer doucement autour des tissus mous, de se reconfigurer et de se raidir pour effectuer des tâches nécessitant de la force ». Permettant d’effectuer une opération par les voies naturelles et sans incision, ce système peut aussi aider les chirurgiens à « gérer les mouvements complexes des tissus mous et les situations incertaines, par exemple, lorsque les organes se déplacent ou bougent avec la respiration et le rythme cardiaque du patient ».
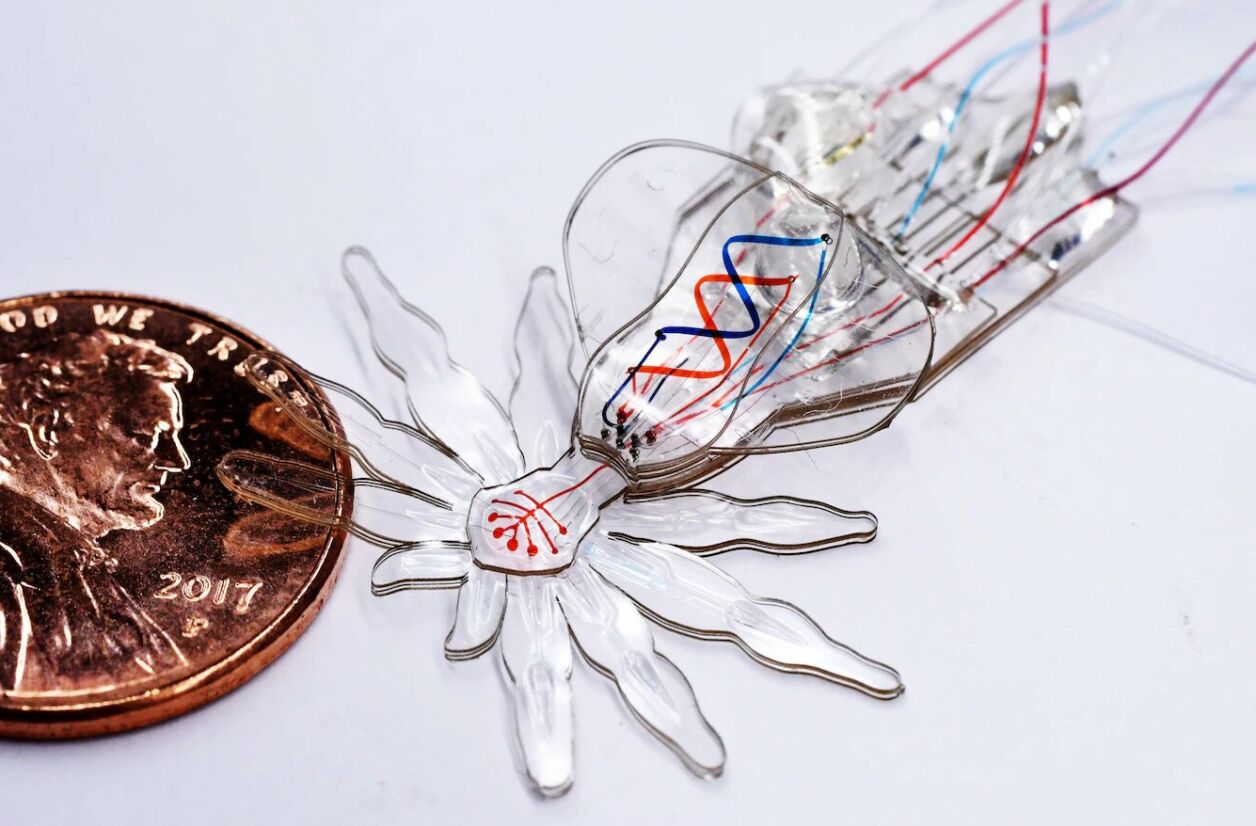
Il est en outre possible que ces robots souples soient, un jour… comestibles. En 2017, des chercheurs de l’École polytechnique fédérale de Lausanne (EPFL) ont dévoilé des actionneurs à base de gélatine, nous rapprochant des robots comestibles. Ces robots seraient en mesure d’administrer directement des médicaments dans le corps et de nous aider à nous nourrir, comme l’avait expliqué Dario Floreano, directeur du Laboratoire de systèmes intelligents à l’EPFL. Il mène actuellement le projet RoboFood qui vise à faire progresser la robotique comestible, et financé par l’UE. « En combinant la science alimentaire et la science robotique d’une manière radicalement nouvelle, le projet RoboFood créera pour la première fois des robots pouvant être mangés et des aliments se comportant comme des robots », peut-on lire sur le site du projet.
Plus tard, se faire livrer une pizza par drone et manger cet appareil en tant que dessert plutôt que le renvoyer pourrait être une possibilité. Outre les livraisons de repas, les robots comestibles auraient de nombreuses applications, capables de fournir une nutrition vitale aux humains dans des situations d’urgence ou encore des vaccins et des suppléments à des espèces animales menacées. « La nourriture robotique dotée d’actionneurs et d’électronique comestibles, par ailleurs, pourrait nous indiquer quand elle est bien conservée et peut être consommée en toute sécurité », indique également le site.
Des robots aux nombreux avantages et inconvénients
Les robots déformables sont souvent inspirés de la nature, comme les vers de terre, les chenilles et les poulpes. Capables de se camoufler, de s’agripper et de saisir des objets, ces derniers sont une source d’inspiration dans la robotique sous-marine. Le Wyss Institute de l’université Harvard a ainsi dévoilé l’Octobot en 2016, « le premier robot autonome et entièrement mou ». Il pourrait, plus tard, non seulement explorer les fonds marins, mais aussi aider les secouristes dans la recherche de victimes dans des zones immergées difficilement accessibles.
C’est d’ailleurs un des avantages des machines souples, comparées à celles en métal. Capables de se faufiler partout, elles seraient aussi utiles sur la terre ferme, pour rechercher les victimes d’un tremblement de terre, par exemple.
La robotique molle présente cependant des inconvénients par rapport à la robotique classique. Étant donné que ces robots se déforment pour bouger, le principal obstacle est que les méthodes actuelles de design et de contrôle de robotique ne sont pas adaptées. En théorie, ces machines peuvent réaliser une infinité de mouvements, impossibles à modéliser avec les méthodes employées pour un robot classique.
« Nous passons d’un monde où le mouvement se décrit par une dizaine voire une vingtaine d’articulations, au maximum, à une robotique déformable qui a, en théorie, une infinité de degrés de liberté. Autrement dit, pour développer l’usage et le potentiel de ces soft robots, il va falloir totalement revoir nos logiciels », expliquait déjà en 2015 Christian Duriez, spécialiste de l’intelligence artificielle (IA) et responsable de l’équipe de recherche Defrost, spécialisée en robotique déformable.
L’énergie de ces machines est un autre problème majeur. Étant entièrement souples, elles ne peuvent pas contenir une batterie. « Une vision de longue date dans le domaine de la robotique molle a été de créer des robots entièrement souples, mais la difficulté a toujours été de remplacer les composants rigides comme les batteries et les commandes électroniques par des systèmes souples analogues, puis d’assembler le tout », indiquait Robert Wood, chercheur du Wyss Institute en 2016. Face à ce problème, l’équipe à l’origine de l’Octobot a trouvé une alternative : elle alimente son robot par réaction chimique, lui permettant ainsi de se mouvoir grâce au gaz produit en interne.
Autant d’obstacles qui expliquent la difficile émergence de la robotique molle, qui devrait néanmoins faire de plus en plus parler d’elle dans les prochaines années.