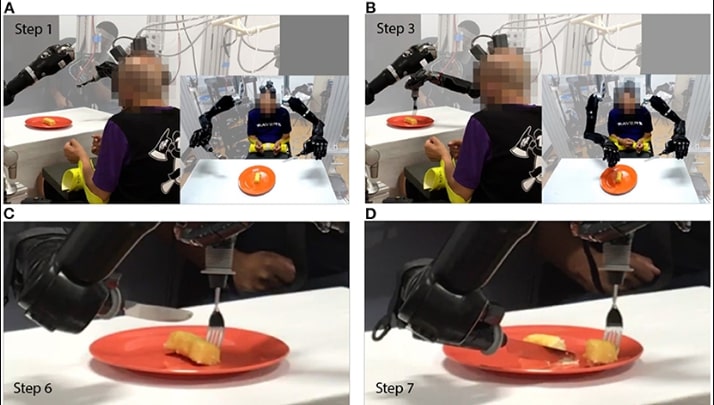
À l’aide de ce système, il est parvenu à contrôler des bras robotiques pour découper des aliments et les porter à sa bouche.
Elon Musk n’est pas le seul à s’intéresser aux interfaces cerveau-machine (ICM) pour aider les personnes paralysées. Des chercheurs de l’université Johns-Hopkins, à Baltimore, ont développé une nouvelle technique permettant à un homme paralysé de se nourrir avec des bras robotiques connectés par une interface. Elle se concentre sur un système de contrôle partagé, « où l’utilisateur du BMI et un robot semi-autonome combinent leurs efforts pour accomplir des tâches ».
Le participant à l’étude a été implanté avec six réseaux de microélectrodes dans les régions sensorimotrices du cerveau, lui permettant d’indiquer des commandes aux bras robotiques pour effectuer une tâche d’auto-alimentation. Celles-ci ont été décodées à partir de signaux neuronaux bilatéraux afin de contrôler quatre degrés de liberté (valeurs indépendantes pouvant être fournies au système). Grâce à la stratégie de contrôle partagé, le participant a pu disposer de douze degrés de liberté pour contrôler la position et l’orientation des bras robotiques.
Un système avec une charge de travail humaine réduite
L’objectif, avec la stratégie de contrôle partagé, est de maximiser les performances des tâches tout en réduisant la charge de travail humaine. « Il s’agit d’une forme d’autonomie ajustable dans laquelle le robot sait nominalement comment effectuer une tâche, et l’intervention humaine est utilisée pour guider et personnaliser le comportement du robot », expliquent les chercheurs. Dans le cadre de l’étude, le participant a été placé entre les bras robotiques et devant une table sur laquelle figurait une pâtisserie. Les mains du robot tenaient une fourchette et un couteau. L’individu a alors été chargé de se servir du contrôle neuronal afin de guider les membres robotiques pour couper un morceau du dessert et l’amener à sa bouche.
Selon les chercheurs, le participant a pu profiter de son plat en l’espace de 90 secondes. À long terme, ils considèrent que ce système permettrait d’accroître l’indépendance des personnes handicapées. « Cette démonstration du contrôle d’un système robotique bimanuel via un BMI en collaboration avec un comportement de robot intelligent a des implications majeures pour la restauration de comportements mobiles complexes pour les personnes vivant avec des déficits sensorimoteurs », ont-ils indiqué.